概要と特長
ロボットシステムにより従来のパレットチェンジャーでは対応できない積荷のレイアウト変更や段数を増やすことが可能です。
1 台あたりの積載量を最大化し、輸送力不足を解消する。
2024年問題によるドライバーの時間外労働規制強化により、これまでと同じ輸送力を維持することが困難になっています。限られたドライバーと車両で輸送量を確保するためには、1台のトラックに積める荷物量を最大化することが不可欠です。
トラックの荷室寸法に合わせて積載個数・段数・レイアウトを最適化し、従来の固定パターンによる積み付けで生じていたデッドスペースを解消することで、1便あたりの積載量を向上させることが可能です。積載効率が上がることで輸送便数の削減にもつながり、ドライバー不足という構造的な課題に対して、現場の省力化と輸送効率の両面からアプローチします。
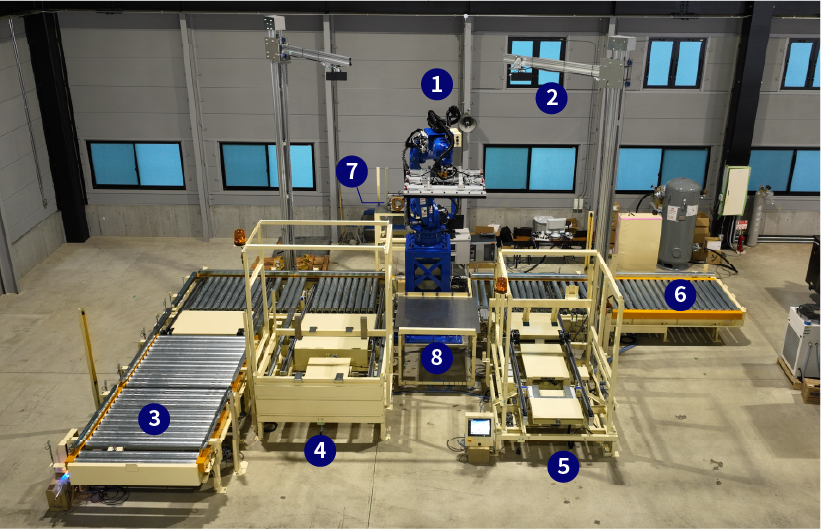
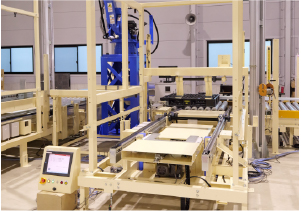
主な装置
-
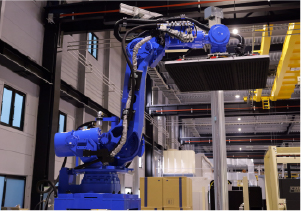
①ロボット -
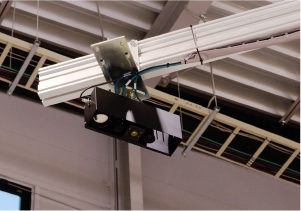
②ビジョン
ワークのズレ量を検出します。 -
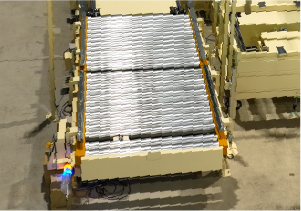
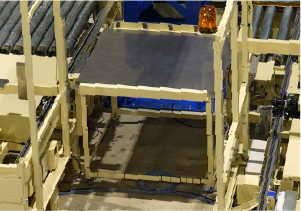
③積込部
積替え前の実パレットを搬入します。 -
④入荷パレットマガジン
移載後の空パレットを段積します。 -
⑤出荷パレットマガジン
出荷パレットを1枚ずつ切り出します。 -
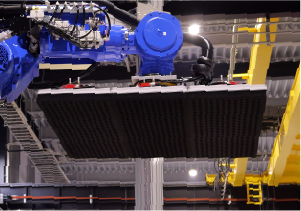
吸着パッド(大)
ワーク1段分を吸着します。 -
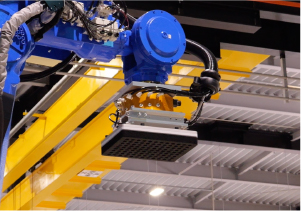
吸着パッド(小)
ワーク1個取りで使用します。 -

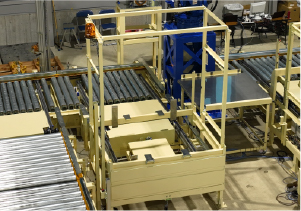
⑥取出部
積替え後のパレットを搬出します。
オプション
-
⑦ツールチェンジャー
ロボットがハンドを持ち替えます。 -
⑧端数仮置き台
最上段の端数のワークを仮置きします。積み付け後、最上段に端数を移載します。
仕様
| 搬送物質量 | MAX 800kg/パレット MAX 16kg/ロボット用搬送物 |
|---|---|
| 積替え前 パレット寸法 | 1,500W×1,300L×147H (積込方向に対しW,Lを示す) |
| 積替え後 パレット寸法 | 1,300W×1,100L×150H 1,200W×1,200L×150H 1,200W×1,000L×150H 1,100W×1,100L×150H (積込方向に対しW,Lを示す) |